O que devo fazer se o meu aspirador robô Tapo da série RV10 não voltar à base de carregamento?
As actualizações recentes podem ter expandido o acesso às funcionalidades abordadas nestas FAQ. Visite a página de suporte do seu produto, selecione a versão de hardware correta para o seu dispositivo e verifique a Folha de dados ou a secção de firmware para obter as últimas melhorias adicionadas ao seu produto.
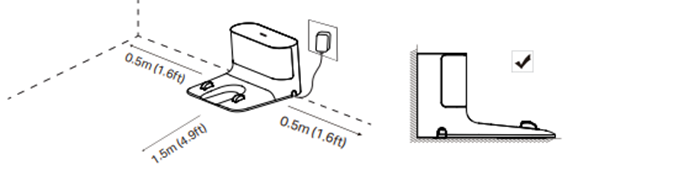
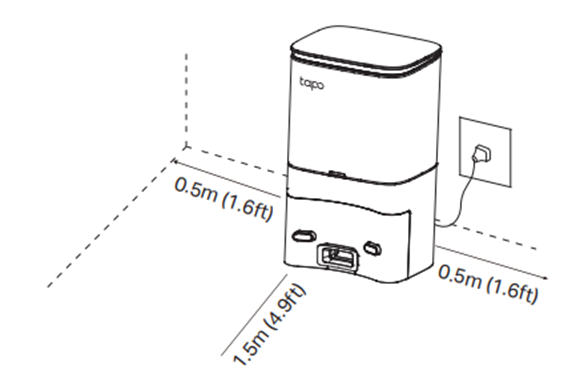
1. 1. Verifique a posição da base de carregamento.
Coloque a base de carregamento numa superfície plana, encostada a uma parede, sem obstáculos num raio de 1,5 m (4,9 pés) à frente e 0,5 m (1,6 pés) à esquerda e à direita. Certifique-se de que a base de carregamento está corretamente ligada.
2. Coloque o aspirador robô 1 metro à frente da base de carregamento. De seguida, inicie a função de recarga para ver se consegue encontrar a base de carregamento com êxito.
Este passo serve para resolver o problema de avaria da base de carregamento ou do módulo de recarga a vácuo. Se não conseguir regressar à base de carregamento, envie-nos um vídeo a mostrar o que faz.
3. Recomenda-se que o aspirador robô seja ligado a partir da base de carregamento.
A série RV10 utiliza o sistema de navegação inercial. Ao iniciar a limpeza a partir da doca de carregamento, a localização da doca e o percurso de limpeza podem ser melhor registados para melhorar a eficiência do recarregamento.
4. Para a série RV10, recomenda-se que não mova o aspirador durante a limpeza.
A posição atual não pode ser reposicionada após um movimento. E o registo do percurso de limpeza atual será perdido, resultando numa redução da eficiência da recarga.
5. Verifique se o ambiente interior tem alcatifas e obstáculos, como bases de ventoinhas, soleiras e pernas de mesas/cadeiras em forma de U.
A série RV10 utiliza o sistema de navegação inercial. Embora a Altura de Cruzamento de Barreiras seja de 2 cm, estes obstáculos podem fazer com que o robô suba e desça repetidamente sobre os obstáculos. As alcatifas podem fazer com que as rodas deslizem. Estes objectos podem levar ao erro dos sensores, como os giroscópios, e causar um registo incorreto do percurso de limpeza. Trata-se de um problema comum dos modelos de sistemas de navegação por inércia.
.


6. Mude a posição da base de carregamento e verifique-a novamente.
Se os passos acima não resolverem o problema, contacte o Suporte Pós-Venda da TP-Link para obter mais ajuda.